

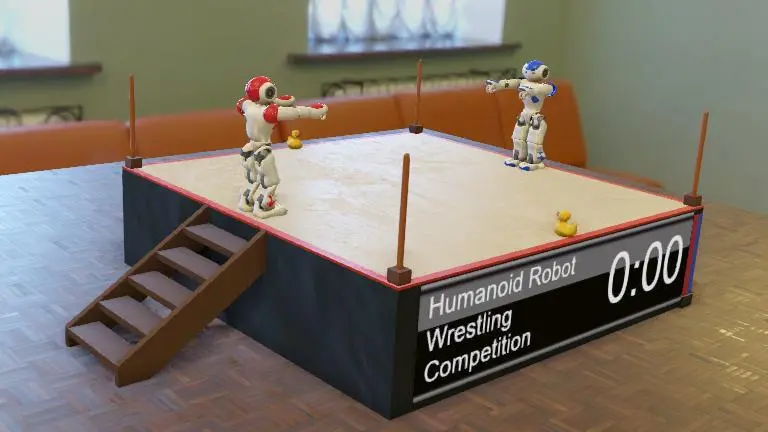
ICRA 2023 会议将于 2023 年 5 月 29 日至 6 月 2 日在伦敦举行。它汇集了来自学术界和工业界的全球顶尖机器人研究人员。在本次活动期间,将组织多项竞赛,以促进机器人的新成就。其中,摔跤比赛将让控制智能人形机器人的最佳算法在摔跤游戏中对抗。虽然比赛在模拟中进行,但这些 3D 小家伙是名为 NAO 的现有真实机器人的真实数字孪生体。因此,他们的 AI 可以以非常直接的方式转移到他们真实对应物的身体中。
(Olivier Michel, CC BY-SA 4.0)
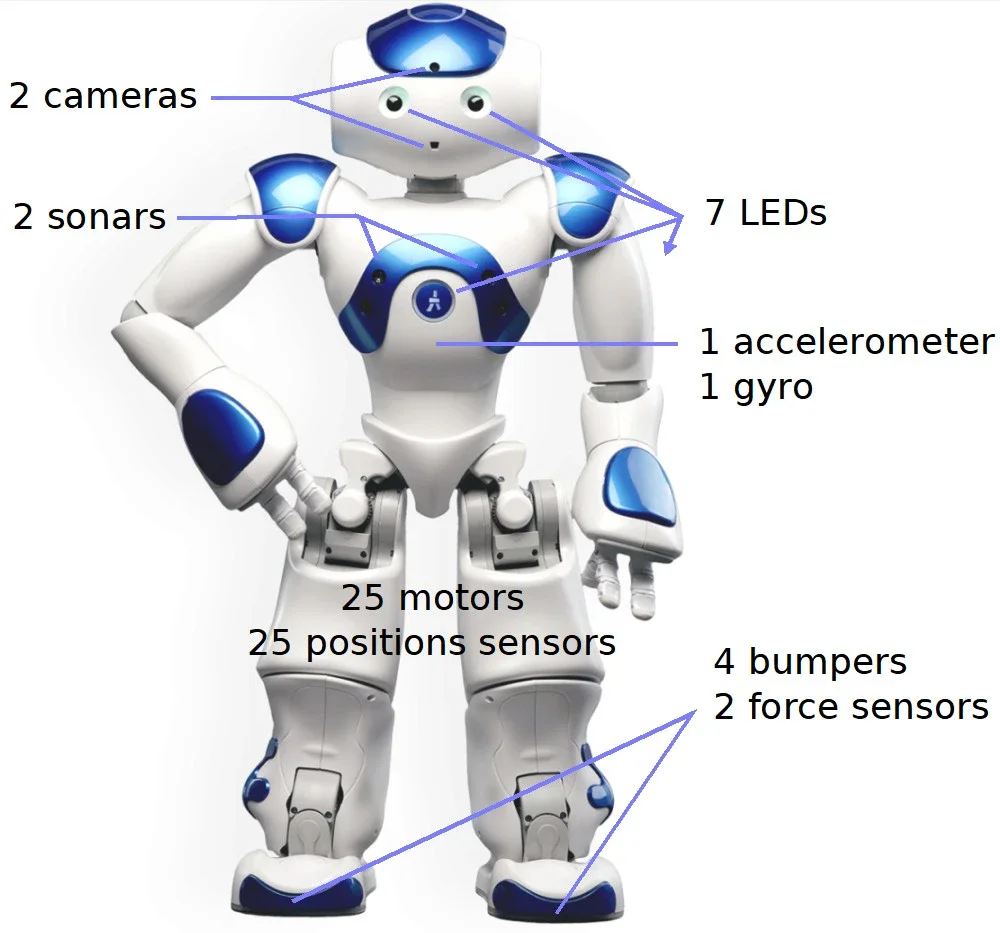
真实机器人的数字孪生体
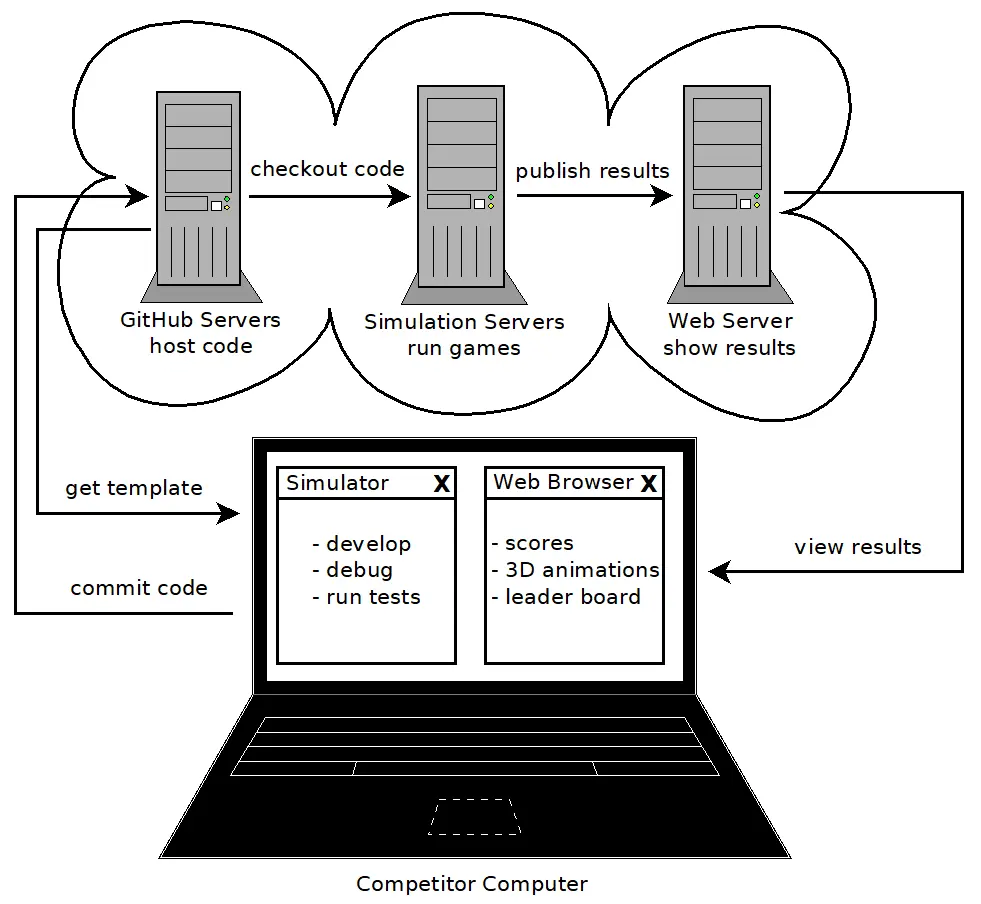
每个机器人都配备了许多传感器和电机。这些设备可从编程界面获得。控制器程序可以检索它们的测量值,例如相机图像,处理它们,并发送电机命令来驱动机器人走向击倒对手的道路。每个参与者可以提交多个版本的控制器程序。对于每个新提交,都会在云端运行一系列游戏。每个人都可以立即从排行榜的网页上以 3D 动画形式观看它们。
允许所有招式
擂台上小家伙们的目标是在不到三分钟内击倒对手。如果无人成功,则覆盖面积最大的机器人获胜。在比赛期间,允许所有招式,包括使用棍子或投掷小塑料鸭子。因为这些家伙有时非常笨拙,所以观看比赛可能非常有趣。
(Olivier Michel, CC BY-SA 4.0)
100% 开源软件
完整的比赛基础设施在 GitHub 上运行,并且完全依赖开源软件,包括 Webots 机器人模拟器。参与者工作流程对于任何软件开发人员来说都很简单,并且可以轻松地重复使用以实施类似的比赛。
(Olivier Michel, CC BY-SA 4.0)
向所有人开放
虽然它需要一些软件开发的基本技能,但任何人都可以参与。机器人可以使用 Python、Rust、 C、C++、Java 或 ROS 进行编程。对可以使用的软件库或编程语言没有限制。
保存日期
如果您想参加,您可以注册到 2023 年 5 月 23 日。但是,我们鼓励您尽早注册,以增加您成功的机会。
- 2023 年 1 月 16 日:注册开放,资格赛开始
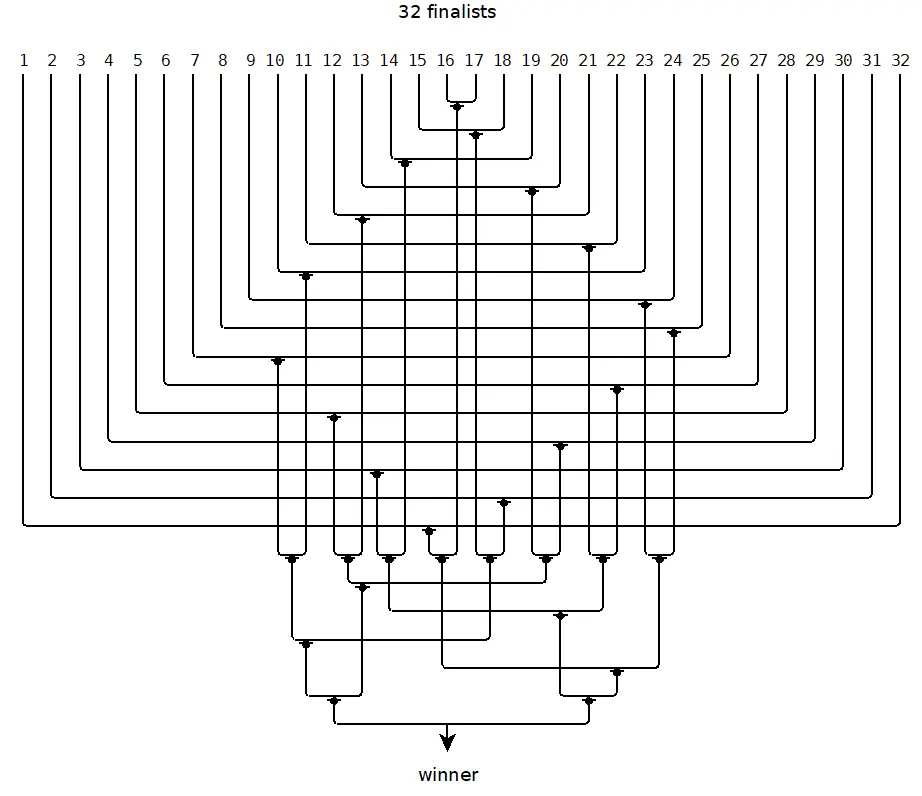
- 2023 年 5 月 23 日:选拔最佳 32 支队伍
- 2023 年 5 月 30 日:1/16 决赛
- 2023 年 5 月 31 日:1/8 决赛
- 2023 年 6 月 1 日:1/4 决赛
- 2023 年 6 月 2 日:半决赛、三四名决赛和决赛
决赛将在伦敦 ICRA 2023 会议期间举行,并将在线实时直播。可以远程参与。
(Olivier Michel, CC BY-SA 4.0)
大奖
比赛的获胜者将获得一个以太币加密货币。虽然其价值在 2023 年 2 月 3 日为 1,659 美元,但在 6 月 2 日可能会完全不同。
促进开放科学的发展
本次比赛由 Cyberbotics Ltd. 组织,这是一家位于瑞士的公司,开发开源 Webots 机器人模拟器。它旨在促进开源软件工具(包括基于云的模拟)的使用,以在机器人研究中取得渐进式进展。通过依赖在云中的虚拟机中运行的开源软件,机器人技术的研究成果变得任何人都可以轻松重现。这使得研究人员能够在同事取得的成果之上构建自己的研究,为本着开放科学精神的渐进式研究铺平道路。
以下是参与的相关链接
希望在那里见到你!





评论已关闭。